对精确的line search(线搜索),有一个重要的定理:
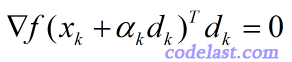
这个定理表明,当前点在  方向上移动到的那一点(
方向上移动到的那一点(  )处的梯度,与当前点的搜索方向 的点积为零。
)处的梯度,与当前点的搜索方向 的点积为零。
line search(一维搜索,或线搜索)是最优化(Optimization)算法中的一个基础步骤/算法。它可以分为精确的一维搜索以及不精确的一维搜索两大类。
在本文中,我想用“人话”解释一下不精确的一维搜索的两大准则:Armijo-Goldstein准则 & Wolfe-Powell准则。
之所以这样说,是因为我读到的所有最优化的书或资料,从来没有一个可以用初学者都能理解的方式来解释这两个准则,它们要么是长篇大论、把一堆数学公式丢给你去琢磨;要么是简短省略、直接略过了解释的步骤就一句话跨越千山万水得出了结论。
每当看到这些书的时候,我脑子里就一个反应:你们就不能写人话吗?
很多最优化算法需要用到一维搜索(line search)子算法,而在众多的一维搜索算法中,大多数都要求函数被限制在一个单峰区间内,也就是说,在进行一维搜索的区间内,函数是一个单峰函数。尽管有一些改进的一维搜索算法(例如  建议的一种改进过的黄金搜索算法)可以处理函数非单峰的情况,但是,在没有确定函数在一个区间内是单峰的之前,即使在搜索过程中,函数值持续减小,我们也不能说极小值是一定存在的,因此,找出一个区间,在此区间之内使函数是单峰的,这个过程是必需的(我更倾向于接受这种观点)。这个过程就叫作划界(Bracket)。Bracket这个单词是括号的意思,很形象——用括号包住一个范围,就是划界。在某些书中,划界算法也被称为进退法。
建议的一种改进过的黄金搜索算法)可以处理函数非单峰的情况,但是,在没有确定函数在一个区间内是单峰的之前,即使在搜索过程中,函数值持续减小,我们也不能说极小值是一定存在的,因此,找出一个区间,在此区间之内使函数是单峰的,这个过程是必需的(我更倾向于接受这种观点)。这个过程就叫作划界(Bracket)。Bracket这个单词是括号的意思,很形象——用括号包住一个范围,就是划界。在某些书中,划界算法也被称为进退法。